Categories
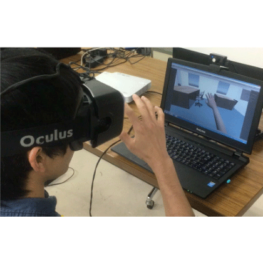
本研究室では自律的かつ可塑的な特性を有する生物システムがいかにして合理的な知を実現しているのか?という問いに対し、工学的立場から数理モデル化を行いその機能解明を試みるとともに、開発した適応・学習のモデルをヒューマン・インタフェースとして実応用することを目指しています。 具体的には、没入型VRとモーション計測装置を組合せて仮想身体を思い通りに動かせるシステムを構築し、不慮の事故などで上肢を失った方が患う幻肢痛を緩和するシステムの開発や、脳波によるブレインコンピュータインタフェースでロボットや筋電気刺激装置を駆動して麻痺肢を思いどおりのタイミングで自発的に動かせる脳卒中リハビリテーションシステムの構築など、人間の認知・運動機能を情報技術により改変・拡張することで、そのメカニズムを認知心理学的に明らかにすることに取り組んでいます。
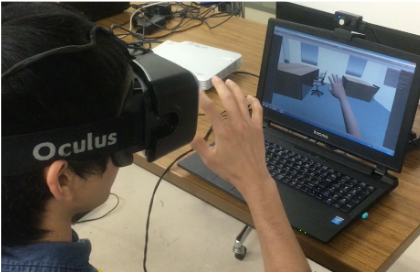
VR幻肢痛緩和システム
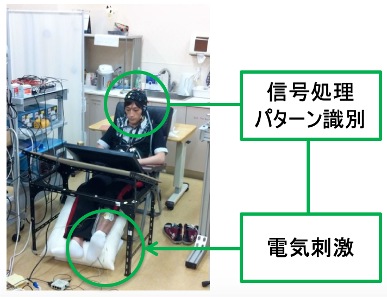
ブレインコンピュータインタフェースによる脳卒中リハビリテーション
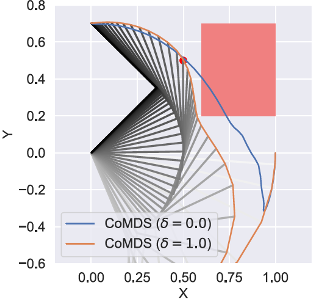
強化学習による人間の運動学習の計算モデル